Robotic endoscope for laser osteotomy/End-effector stabilization in minimally invasive surgery
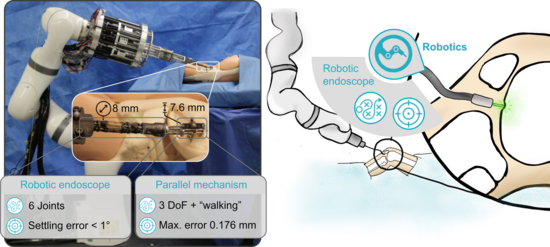
We develop a positioning and stabilization mechanism for the end-effector of an endoscope to enable high precision laser cutting of hard tissue (bone). The stabilization mechanism enhances end-effector control and positioning of the robotic endoscope with respect to the anatomy of interest. This is required since the laser optics, integrated to the endoscope tip has to be positioned and stabilized relative to the cutting surface accurately and precisely in order to enable accurate and precise laser cuts. Several disturbances are present at the endoscope tip such as thrust forces induced by a cooling jet, interactions of the endscope with the surrounding tissue, possible movement of the patient or artefacts from the actuation of the robotic endoscope. All these disturbances should be compensated in order to reach the required mechanical precision and accuracy in the sub-millimeter range.
In this project, we will use novel actuation and automation equipment for rapid prototyping. A bone-attached parallel robotic mechanism is developed to perform high precision bone cutting according to the planned intervention. As a result, we will have a functional prototype of a high accuracy endoscopic laserosteotome.
Project leader: Prof. Dr. Georg Rauter
Dissertation: Robotic system for accurate minimally invasive laser osteotomy





M. Eugster, "Robotic system for accurate minimally invasive laser osteotomy," at-Automatisierungstechnik, vol. 70, no. 7, pp. 676-678, 2022. (dissertation summary)
M. Eugster, C. Duverney, M. Karnam, N. Gerig, P. C. Cattin, and G. Rauter, “Robotic endoscope system for future application in minimally invasive laser osteotomy: First concept evaluation,” IEEE Transactions on Medical Robotics and Bionics, 2022. (incl. supplementary video)
P. Krenn, M. Eugster, E. I. Zoller, N. F. Friederich, and G. Rauter, “Towards robotic surgery for cartilage replacement: A review on cartilage defects,” in New Trends in Medical and Service Robotics (G. Rauter, G. Carbone, P. C. Cattin, A. Zam, D. Pisla, and R. Riener, eds.), (Cham), pp. 125–136, Springer International Publishing, 2022
M. Eugster, J.-P. Merlet, N. Gerig, P. C. Cattin, and G. Rauter, “Miniature parallel robot with submillimeter positioning accuracy for minimally invasive laser osteotomy,” Robotica, pp. 1–28, 2021. (incl. supplementary video)
M. Eugster, E. Zoller, P. Krenn, S. Blache, N. F. Friederich, M. Müller-Gerbl, P. C. Cattin, and G. Rauter, "Quantitative Evaluation of the Thickness of the Available Manipulation Volume Inside the Knee Joint Capsule for Minimally Invasive Robotic Unicondylar Knee Arthroplasty," in IEEE Transactions on Biomedical Engineering, vol. 68, no. 8, pp. 2412-2422, 2021. (incl. supplementary data)
M. Eugster, M. Oliveira Barros, P. C. Cattin, and G. Rauter, "Design Evaluation of a Stabilized, Walking Endoscope Tip,” In New Trends in Medical and Service Robotics (MESROB 2020), vol. 93, pp 127-135, Springer, November 2020.
M. Eugster, P. Cattin, A. Zam, and G. Rauter, “A Parallel Robotic Mechanism for the Stabilization and Guidance of an Endoscope Tip in Laser Osteotomy,” In IEEE Conference on Intelligent Robots and Systems (IROS), pp.1306-1311, 2018. (incl. supplementary video)
M. Eugster, E. I. Zoller, L. Fasel, P. Cattin, N. F. Friederich, A. Zam, and G. Rauter, “Contact force estimation for minimally invasive robot-assisted Laserosteotomy in the human knee,” In Joint Workshop on New Technologies for Computer/Robot Assisted Surgery (CRAS), vol. 8, pp. 39-40, 2018.
M. Eugster, P. Weber, P. Cattin, A. Zam, G. Kosa, and G. Rauter, “Positioning and stabilization of a minimally invasive laser osteotome,” In Hamlyn Symposium on Medical Robotics, vol. 10, pp. 21-22, 2017.
Completed
- Master Thesis: Actuation and Control of a Robotic Endoscope for Laser Osteotomy in the Knee (PDF, 2.60 MB)
- Bachelor Thesis: Design of Active Leg Fixation for a Self-Stabilizing Robotic Endoscope (PDF, 1.17 MB)
- Master Thesis: Actuation design for a bone-mounted parallel mechanism (PDF, 942.54 KB)
- Semester Thesis: Design of a flexible endoscope shaft for laser osteotomy in the knee (PDF, 2.60 MB)
- Semester Thesis: Design of a decoupling mechanism for disturbance rejection in robotic laser osteotomy (PDF, 701.26 KB)
- Master Thesis: End-effector stabilization of a robotic endoscope in laser osteotomy (PDF, 117.31 KB)
- Master Thesis: Learning desired null-space poses for inverse kinematics from the operator (PDF, 1.44 MB)
- Master Thesis: Interactive approach path planning system for insertion of a robotic endoscope in the human knee (PDF, 276.99 KB)
- Internship: Structural analysis of a miniature parallel robot for precise milling in surgery
- Master Thesis: Plug & p...erform surgery – design of a mechanical interface to safely detach a tendon-driven robotic endoscope (PDF, 132.15 KB)
- Master Thesis: Design of a rotational endoscope joint with integrated joint position sensor (PDF, 1.21 MB)
- Master Thesis: Path planning for hyper-redundant surgical robots
- Internship: Path planning for planar hyper-redundant surgical robots (PDF, 183.12 KB)