Smart Minimally-Invasive Laser Robot
The BIROMED-Lab has developed a minimal-invasive robot for cutting bone with high power laser light within the MIRACLE project. The miniature robot can be inserted into the human body through small incisions. Inside the body, e.g. in the human knee joint, the robot fixes itself to the target tissue and can guide the laser light at high precision to the target location. When the robot has performed all necessary cuts, it can “walk” to a new position on the target tissue and continue its work.
The advantages of minimal-invasive laser cutting with a robot are:
- cuts will be executed as planned
- access holes are small
- (thermal) damage to adjacent tissue is minimal
- cuts can have predefined functions (e.g. stability by forms, guidance for reassembly by design)
- healing times are shorter than mechanical cuts.
Since one year, we also investigate the advantage of laser cuts for regenerative cartilage surgery to treat arthritis.
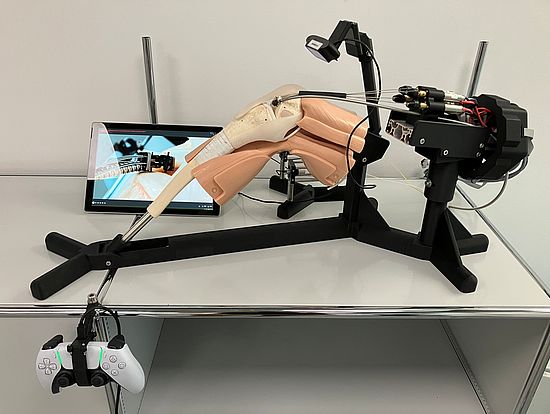
Setup of the MIRACLE project for the World Exposition 2025 in Osaka, Japan. The miniature MIRACLE laser robot is fixed inside a phantom knee joint and visualizes laser ablation of bone or cartilage. Visitors of the World Expo have a direct visual access to the robot that is actuated by flexible shafts from outside. The setup allows to manipulate the robot in a simple way by a Playstation 5 controller and activate harmless demo versions of the cutting and analysis lasers. (Image: Michael Sommerhalder)
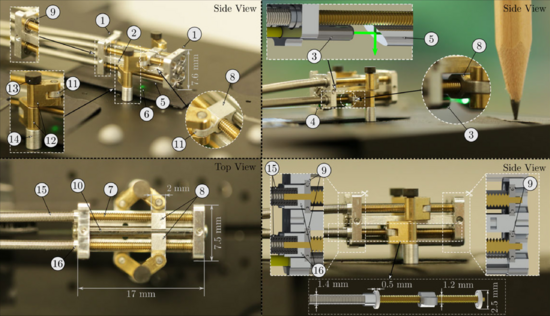
The miniature laser robot of the MIRACLE project is small enough to fit into the a human knee joint [1]. The robot allows for precise (~70µm) positioning of the laser to perform point-wise ablation for obtaining a continuous laser cut. The miniature robot directly attaches to target tissue inside the patient. The direct attachment allows to decouple forces from the patient to the robot actuation and inversely by using flexible shafts for actuation. Only in this way, precise positioning can be reached despite disturbance forces onto the robot through interaction with the surrounding tissues [2]. (Image by Manuela Eugster, taken from [2])


Bio-Inspired Robots for Medicine-Lab (BIROMED-Lab)
BIROMED-Lab Website
Group leader: Prof. Dr. Georg Rauter
georg.rauter@clutterunibas.ch
Project leader: Dr. Michael Sommerhalder
michael.sommerhalder@clutterunibas.ch
References
- Project website
- Publication: M. Eugster et al., "Quantitative Evaluation of the Thickness of the Available Manipulation Volume Inside the Knee Joint Capsule for Minimally Invasive Robotic Unicondylar Knee Arthroplasty," IEEE Trans. Biomed. Eng., 2021.
- Publication: M. Eugster et al., "Miniature parallel robot with submillimeter positioning accuracy for minimally invasive laser osteotomy," Robotica, 2022.