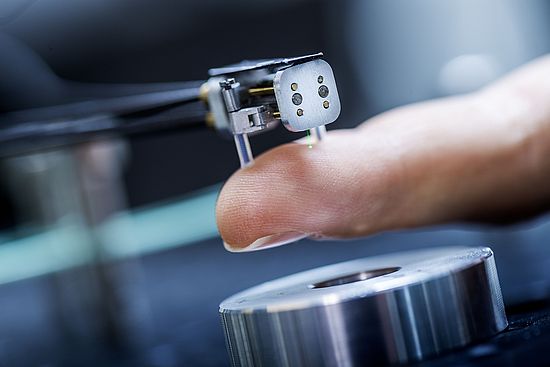
Miniature Robot for Accurate Tool Positioning in Medical Interventions
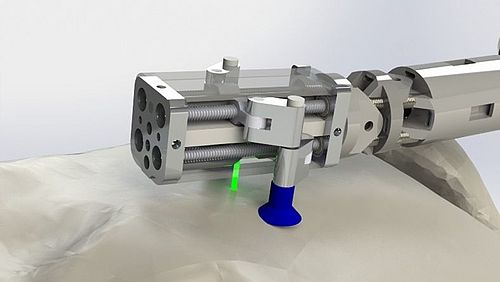
Our goal is to enable high-precision surgical procedures with our innovative approach: A miniature robot consisting of a local attachment to the treatment site and a parallel mechanism that allows manipulating a surgical tool with high accuracy in relation to this attachment.
Related reserach projects


Publications
M. Eugster, P. Weber, and G. Rauter, "Medical Endodevice," US11617495B2 Patent
M. Eugster, J.-P. Merlet, N. Gerig, P. C. Cattin, and G. Rauter, “Miniature parallel robot with submillimeter positioning accuracy for minimally invasive laser osteotomy,” Robotica, pp. 1–28, 2021. (incl. supplementary video)
For further publications refer to the individual project pages.