Force-sensitive Endoscope Tip for Minimally Invasive Surgery
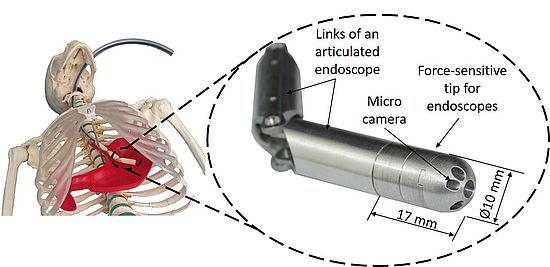
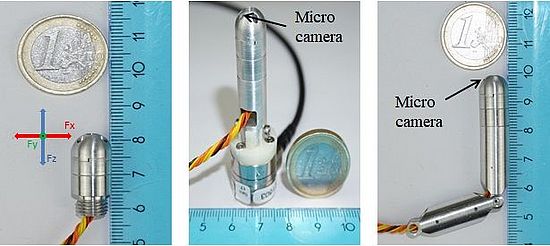
In this PhD project, we develop a normal and shear force-sensitive, exchangeable tip for endoscopes. With help of the data provided by the force-sensitive endoscope tip we intend to restore the partially or completely lost sense of touch to surgeons in minimally invasive endoscopy. As a final goal, the force-sensitive endoscope tip is intended to exhibit similar properties as the human fingertip in terms of sensitivity and time response.
When the 3D force measurement at the tip of the endoscope is combined with precise measurement of the endoscope’s movement, even the elastic properties of the tissue inside wounds can be determined. This procedure of haptically exploring tissue properties, usually performed by the surgeon’s finger, is called palpation. The knowledge of differences in the tissue stiffness allows the surgeon to determine structures under the tissue surface that cannot easily be seen with bare eyes (i.e. the border of cancerous tissue ). However, in minimally invasive surgery, the access for palpation with fingers is limited to small skin incisions (up to 20 mm long). Therefore, in deep wounds the surgeon simply cannot reach the desired location of palpation with the finger. Moreover, in case of flexible endoscopes, the surgeon cannot relate the felt forces at the endoscope handle to the forces that act on the endoscope tip. Thus, particularly for flexible endoscopes, 3D force sensing in combination with measurement of the endoscope shape is important for providing feedback about tissue properties.
Project leader: Georg Rauter




I. Sušić, A. Zam, P. Cattin, G. Rauter, “Enabling Minimal Invasive Palpation in Flexible Robotic Endoscopes,” in New Trends in Medical and Service Robotics (MESROB), 2018.
I. Sušić, P. Cattin, A. Zam, G. Rauter, “Versatile, Force Range-Adjustable, Tri-axial Force Sensor with Integrated Micro Camera for the Tip of Endoscopic Devices,” in Hamlyn Symposium on Medical Robotics, vol. 11, 2018.