LAser-assisted RObot-guided CArtilage REgeneration (LAROCARE)
Motivation
Joint injuries and cartilage degeneration are major health problems affecting millions of people worldwide, leading to pain, loss of mobility and reduced quality of life. Current treatments for cartilage defects are often invasive, lack precision and produce inconsistent results in cartilage regeneration. In response, the LAROCARE project aims to develop a minimally invasive, high-precision surgical solution that combines robotic technology with laser-based techniques to prepare defective cartilage tissue. This approach offers precise cutting capabilities, minimal collateral tissue damage and improved cartilage repair outcomes through robotic guidance and real-time feedback.
Project Overview and Partners
The LAROCARE project is an interdisciplinary collaboration to address the challenges of treating cartilage defects with advanced technology. The project integrates expertise from several fields:
- Robotics and mechatronics – BIROMED-Lab, led by Prof. Georg Rauter: The team is developing the robotic components and control systems essential for this highprecision intervention.
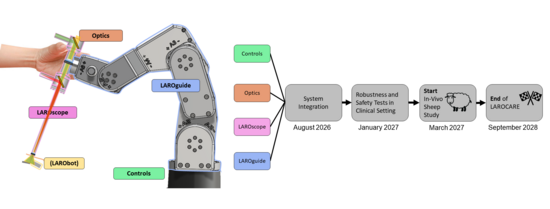
- Laser and optical technologies – CIO, led by Prof. Ferda Canbaz: This team designs the laser systems to cut defective cartilage with minimal tissue damage, allowing precision unattainable by traditional manual methods. The system also includes an optical coherence tomography (OCT) fibre for intra-operative imaging and sensing.
- Cell Biology and Cartilage Engineering, Prof. Andrea Barbero: This team focuses on regenerative tissue engineering, where chondrocytes (cartilage cells) are encapsulated in biocompatible gels for improved tissue integration. In addition, their research focuses on replacing the usual cell source for growing a cartilage implant from the joints with the nasal region, which promises to be less invasive.
- Clinical Veterinary Expertise, Prof. Antonio Pozzi - Animal studies in sheep will provide valuable insight into the efficacy and safety of the laser-assisted robotic system.
- 3D imaging and microtomography, Dr. Georg Schulz - This team will ensure that structural and cellular imaging meets the project's requirements to assess cartilage regeneration at the microscopic level.
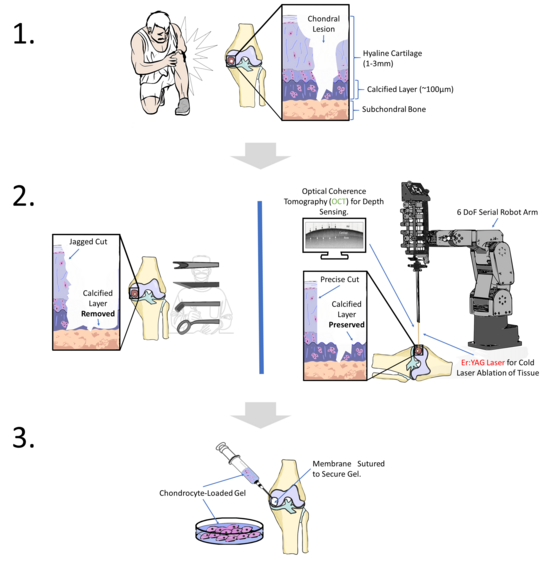
(1) The LAROCARE project focuses on chondral lesions on the femoral condyle. If left untreated, these lesions can enlarge and progress to osteoarthritis, leading to chronic pain and reduced mobility. (2) The degenerated and necrotic cartilage is removed (debridement) to prepare the defect site for implantation. Conventional manual tools often create jagged cuts and remove the calcified cartilage layer, which may compromise graft stability. LAROCARE proposes a robot-assisted approach using a 6 DoF serial robot arm equipped with an Er:YAG laser for cold laser ablation. Optical Coherence Tomography (OCT) provides real-time depth sensing, enabling precise removal of damaged cartilage while preserving the calcified layer—a step hypothesized to improve graft integration. (3) A chondrocyte-loaded gel is implanted into the prepared defect and secured with a membrane. While current treatments use both solid grafts (autografts, allografts, engineered tissues) and gels, LAROCARE focuses on optimizing gel-based repair for superior integration, with future work directed toward precisely shaping solid grafts for enhanced fit.
The LAROCARE team (left to right: Arsham Hamidi, Vinamrata Bhardwaj, Jan Schimmelpfennig, Michael Sommerhalder)






For more information about this project, please contact Michael Sommerhalder.

Jan Schimmelpfennig
PhD Student

Michael Sommerhalder, Dr. sc. ETH Zurich
Postdoctoral Associate

Georg Rauter, Associate Prof. Dr. sc. ETH Zurich
Head of Bio-Inspired RObots for MEDicine-Lab (BIROMED-Lab)
Hegenheimermattweg 167C, Room 02.021
CH-4123 Allschwil, Switzerland
t: +41 61 207 54 70
f: +41 61 207 54 09

Head of CIO
Laser Safety Officer of Department of Biomedical Engineering (DBE)
Department of Biomedical Engineering
Hegenheimermattweg 167C,
Room 02.027
4123 Allschwil, Switzerland
Phone: +41 61 207 54 67
SEND E-MAIL
Deputy head of CIO
CIO Technical Coordinator for MIRACLE project
Department of Biomedical Engineering
Hegenheimermattweg 167C,
4123 Allschwil, Switzerland
Phone: +41 78 658 33 30

Prof. Dr. Andrea Barbero
Department of Biomedicine (DBM)
Hebelstrasse 20
4056 Basel, Switzerland
Phone: +41 61 265 23 85
SEND E-MAIL
Prof. Dr. Antonio Pozzi
Head of the Department of Small Animal Surgery
University of Zurich

S. Freund, DBE
Dr. Georg Schulz
Scientific & Operational Head of Micro- & Nanotomography (MiNa)
Department of Biomedical Engineering
Hegenheimermattweg 167C,
4123 Allschwil, Switzerland
Barbero Lab (University of Basel):
https://biomedizin.unibas.ch/en/research/research-groups/barbero-lab/
Center for Intelligent Optics (CIO) (University of Basel):
https://dbe.unibas.ch/en/research/lasers-robotics/center-for-intelligent-optics/
Small Animal Sugery Department (University of Zürich):
https://www.tierarzt-prof-antonio-pozzi.com/en/prof-antonio-pozzi.html
- Master Thesis: OCT-Based Adaptive Orientation Control (PDF, 4.10 MB)
- Master Thesis: Constraint-Compliant Control for Laser Ablation (PDF, 4.06 MB)
- Master Thesis: Markerless Preop-Registration with Stereovision (PDF, 4.04 MB)
- Internship: Mechatronic System Development (PDF, 4.04 MB)
- Master Thesis: Trinocular Endoscope Stereomatching (PDF, 4.06 MB)