Attachment Strategies for Surgical Robots
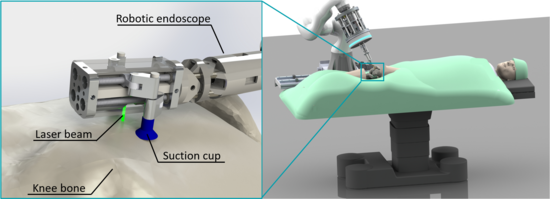
The main focus of this research project is to develop attachment mechanisms for medical instruments, which allow precise minimally invasive interventions. One application of such a strategy is the stabilization of a miniature parallel robot that performs laser guidance in minimally invasive laser osteotomy [Eugster et al., 2022]. A local and direct connection between a medical instrument and an anatomical target can increase the accuracy of instrument positioning, for example, due to increased robustness against disturbances such as patient movement. However, developing attachment mechanisms for a minimally invasive medical instrument is challenging for several reasons. For example, the available spaces for mounting active elements such as actuators are limited. Also, the mechanism should not injure the tissue to which it attaches. Furthermore, attachment to anatomical surfaces is challenging because of the biomechanical characteristics and variable morphology.
We are developing miniaturized attachment mechanisms suitable for integration into surgical robots and investigating different strategies such as the use of suction cups. The current focus is on the application for minimally invasive cutting of bone, where precise and stable guidance of the laser beam is essential.
Project leader: Yukiko Tomooka




Y. Tomooka, M. Karnam, M. Eugster, P. C. Cattin, and G. Rauter, “Disturbance Propagation Mitigation Between a Deployable Miniature Surgical Robot and Its Insertion Device,” in Advances in Mechanism and Machine Science (M. Okada, ed.), (Cham), pp. 800–809, Springer Nature Switzerland, 2023
Y. Tomooka, G. Rauter, N. Gerig, R. Takeda, P. Cattin, and M. Eugster, “Bending stiffness variability between a deployable robotic laser osteotome and its insertion device,” Current Directions in Biomedical Engineering, vol. 8, no. 1, pp. 138–141, 2022 (Best Poster Award 1st Prize)
M. Eugster, M. Oliveira Barros, P. C. Cattin, and G. Rauter, "Design Evaluation of a Stabilized, Walking Endoscope Tip,” In New Trends in Medical and Service Robotics (MESROB 2020), vol. 93, pp 127-135, Springer, November 2020.