Dual Inverted Pendulum
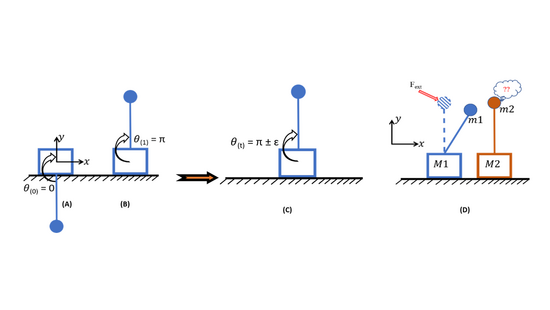
An inverted pendulum is one of the common problems in control theory. The purpose is to swing up the pendulum from its stable position as shown in Figure A to its unstable position Figure B and then try to stabilize it by moving the cart as depicted in Figure C.
At the lab, a demo has been developed to demonstrate different control concepts. But, instead of one pendulum, the setup consists of two separate pendulums, each mounted on a cart as depicted in Figure D. These two subsystems are virtually connected; hence, the disturbance on one pendulum affects the other. Such a setup makes it possible to test different virtual connections such as a spring, a spring damper or a damper connection. In addition, various control concepts could be tested, such as the effect of delaying the sensors feedback signal, different control schemes and the effect of changing the properties of the pendulum.
Project leader: Mohammad Khair Nahhas