Bio-Inspired Actuation for Robotic Endoscopes
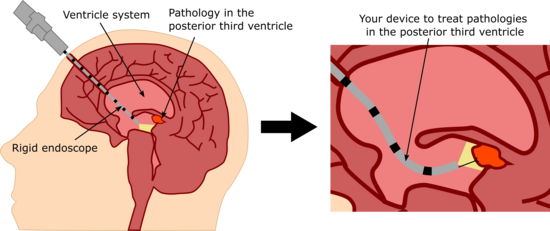
Endoscopes are medical devices that surgeons use to get a view of the inside of a patient. In contrast to open surgeries, endoscopic interventions require smaller incisions and reduce the trauma on the tissue. Patients undergoing endoscopic surgery profit from less blood loss and they can leave the hospital sooner after a surgery.
Despite all the benefits of endoscopic surgery for the patient, surgeons have a hard time manipulating the endoscopes. They have to concentrate on the advancement and the rotation of the endoscope through a small opening in the skin, while the actual task is to inspect the surgical site, take biopsies, or resect pathological tissue. Robotic endoscopes with some level of autonomy are a promising solution to simplify endoscope manipulation. While the robot performs endoscope steering, the surgeon could focus more on the tasks that cannot be automated.
But how do we ensure that those automated robot movements are performed in a safe way? Instead of relying only on software control, we're also designing the mechanics of the robotic endoscope to be inherently safe. In contrast to traditional robots, which are designed to be as stiff as possible, our patented approach is to integrate elastic elements in the robotic endoscope structure - to be exact, in the transmission between motor and the moving endoscope tip. A glimpse to nature shows that this combination of motors, rigid links, and elastic connections has proven effective for systems that are in physical contact with the environment: Musculoskeletal systems, for example human fingers, are essentially rigid links (bones) that are actuated by motors (muscles) via elastic elements (tendons).
The elastic elements reduce contact forces between the moving part and the environment, which means that in case of unintended collisions, the robotic endoscope would not damage the tissue.
Furthermore, the deflection of the elastic elements can be measured to get an estimate of the forces applied to the endoscope tip. This force information can be forwarded to the surgeon as "haptic feedback" - to not only see, but feel interactions with the tissue. For more autonomous tasks, the force estimate can be used as sensor feedback to actively control and/or limit the contact forces of the endoscope tip with the tissue.
Project leader: Dr. Lorin Fasel
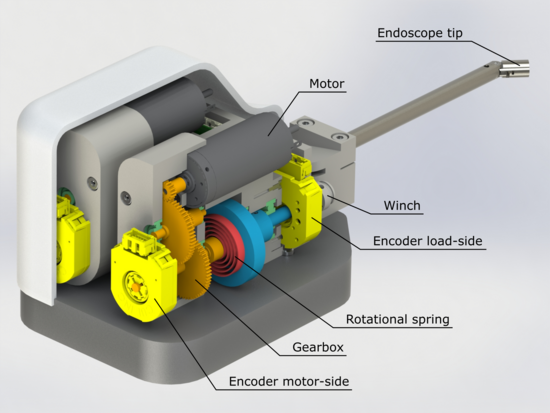
Our approach to safer robotic endoscope actuation is based on the principle of series elastic actuation. Instead of connecting the movable part (endoscope tip) with the motor as rigidly as possible, we include an elastic element (rotational spring) in the transmission. This reduces impact forces and measuring the deflection of the spring (encoders on either side of the spring) allows to estimate the force applied at the endoscope tip.

The endoscope tip can be steered automatically thanks to a miniature camera, which is integrated at the endoscope tip. Basel Area Business & Innovation showcased a demo setup with this vision-based control as part of the "Basel is changing your life" campaign (https://www.innovationbasel.com/). The video of the campaign can be found here: https://www.youtube.com/watch?v=CgK_AF63OTc




L. Fasel, N. Gerig, P. C. Cattin, and G. Rauter, “Control evaluation of antagonistic series elastic actuation for a robotic endoscope joint,” Journal of Bionic Engineering, Mar. 2022
L. Fasel, N. Gerig, P. C. Cattin, and G. Rauter, “The SEA-scope: Torque-limited endoscopic joint control for telemanipulation or visual servoing through tendon force control with series elastic actuation,” in 2021 International Symposium on Medical Robotics (ISMR), IEEE, Nov. 2021
L. Fasel, N. Gerig, P. C. Cattin, and G. Rauter, “Tendon Force Control Evaluation for an Endoscope with Series Elastic Actuation,” In New Trends in Medical Service Robotics (MESROB 2020), vol. 93, pp. 118-126, Springer, November 2020. (Best Research Paper Silver Award)
L. Fasel, S. Schraivogel, N. Gerig, N. F. Friederich, A. Zam, P. C. Cattin, and G. Rauter, “Visual servoing for tracking cartilage with a robotic endoscope,” In Proceedings on Automation in Medical Engineering (AUTOMED 2020), vol. 1, Infinite Science Publishing, February 2020. (2nd Place Best Paper Award)
Completed
- Master Thesis: Evaluation of tracking algorithms for a visually servoed robotic endoscope (PDF, 803.35 KB)
- Semester Thesis: Design of series elastic actuation for a cable-driven articulated endoscope (PDF, 130.79 KB)
- Master Thesis: Vision-based registration and control of a robotic endoscope for laser ablation (PDF, 1.31 MB)
- Master Thesis: Development of a mechanical quickcoupling for a tendondriven robotic endoscope schematic (PDF, 145.05 KB)
- Master Thesis: Design of a rotational endoscope joint with integrated joint position sensor (PDF, 175.75 KB)
- Master Thesis: Optimization-based design of a robotic endoscope for intraventricular tumor surgery (PDF, 228.56 KB)
- Master Thesis: Development of an endoscopic device to treat pathologies in the posterior third ventricle (PDF, 536.16 KB)