Miniature Robot for Accurate Surgical Tool Positioning
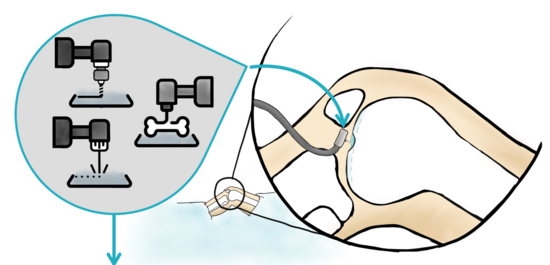
Our goal is to enable high-precision surgical procedures with our innovative approach: A miniature robot consisting of a local attachment to the surgical site and a parallel mechanism that allows manipulating a surgical tool with high accuracy in relation to this attachment.
Series Elastic Actuation (SEA) for Safer Robotic Endoscopes

We aim to make robotic endoscopes safer by using a bio-inspired actuation approach: Integrating elastic elements in the transmission reduces endoscope-tissue contact forces and makes it possible for the surgeon to not only see but “feel” the interaction with the tissue.