Robotic Platforms with Intuitive Control for Minimally Invasive Surgical Procedures
Projects within this framework investigate the development and use of robotic platforms with intuitive control for minimally invasive surgical procedures. The focus of these projects is to develop a robotic platform, consisting of a robot and control strategies, to be used safely and intuitively for positioning end-effectors in minimally invasive surgeries, e.g. laserosteotome.
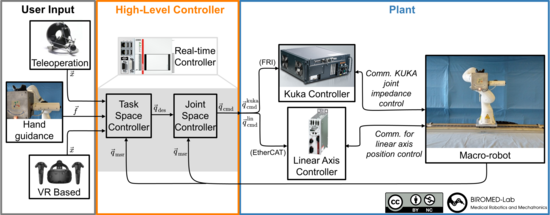
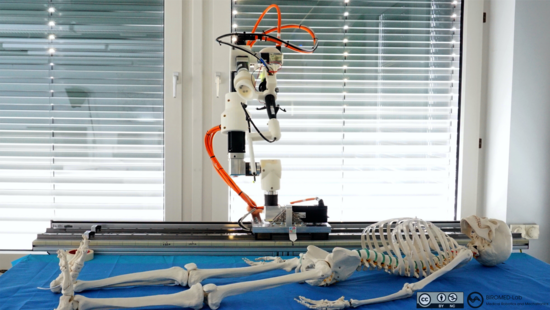
The main focus of this project is to develop a set of control modes for the robot, which will allow a surgeon to physically interact with the robot to steer it in a collaborative manner. The goal is to reduce time taken for setting up and conducting surgical procedures by providing low level autonomy to the robot while keeping the surgeon in charge of high-level decisions. Safety critical procedures will be developed for safe recovery or abort in case of technical failures, detectable adverse events, or surgeon command. Developed control strategies and safety procedures should control robot, end-effector, and laserosteotome within the same real-time system to guarantee deterministic response times. The project is evaluated on a commercially available robot (KUKA LBR iiwa 14) with an extended degree of freedom (DoF) using a linear axis (AL2412 motor controlled with a Bechkoff AX5106 servo drive).
The project was started with a self-prototyped 6-DoF robot (GG1).
Project leader: Dr. Nicolas Gerig











M. Zelechowski, M. Karnam, B. Faludi, N. Gerig, G. Rauter, and P. C. Cattin, “Patient positioning by visualising surgical robot rotational workspace in augmented reality,” Computer Methods in Biomechanics and Biomedical Engineering: Imaging & Visualization, vol. 10, no. 4, pp. 451–457, 2022
M. Karnam, P. C. Cattin, G. Rauter, and N. Gerig, “Comparing cascaded real-time controllers for an extended KUKA LBR iiwa robot during physical human-robot interaction,” in Siebte IFToMM D-A-CH Konferenz 2021, February 2021
M. Karnam, A. Ivanovic, M. Eugster, M. Zelechowski, P. C. Cattin, G. Rauter, and N. Gerig, “Intuitive control of macro-robots for surgery,” Presentated at the 6th DBE Research Day, September 2020
M. Karnam, M. Eugster, R. Parini, P. C. Cattin, E. De Momi, G. Rauter, and N. Gerig, " Learned Task Space Control to Reduce the Effort in Controlling Redundant Surgical Robots,” in New Trends in Medical and Service Robotics (MESROB 2020), vol. 93, pp 161-168, Springer, November 2020 (Best Research Paper Gold Award)
G. Kosa, G. Aiello, P. Cattin, A. Zam, and G. Rauter, “Automation of a fexoscope for laser osteotomy,” in In 17 th Annual Meeting of the International Society for Computer Assisted Orthopaedic Surgery, 2017.
Completed
- Master Thesis: Surgical robot for laser osteotomy (PDF, 3.00 MB)
- Semester Thesis: Design and simulation of series elastic joints for a prototype surgical robotic arm (PDF, 1.24 MB)
- Master Thesis: Learning desired null-space poses for inverse kinematics from the operator (PDF, 1.44 MB)
- Master Thesis: Development of a modular series elastic joint for a prototype robotic arm for surgeries (PDF, 1.24 MB)
- Master Thesis: Intuitive surgeon robot interface to control macro-robots and exchange surgical tools
- Master Thesis: Path planning for hyper-redundant surgical robots
- Internship: Path planning for planar hyper-redundant surgical robots (PDF, 183.12 KB)
- Master Thesis: Quantitative evaluation of shared surgeon-robot workspace for robot assisted knee surgeries (PDF, 2.94 MB)
- Bachelor Thesis: Comparing cascaded controller architectures for reactive series elastic actuators (PDF, 2.39 MB)
- Internship: Path planning for a hyper redundant robot inside the human knee (PDF, 125.88 KB)