Reactive and Flexible Robotic Systems for In situ (bio)Printing of Patient-Specific Implants
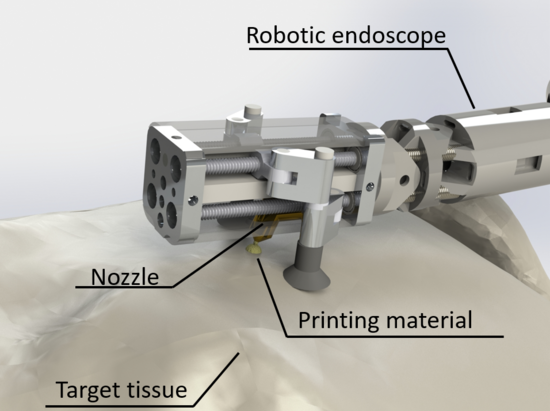
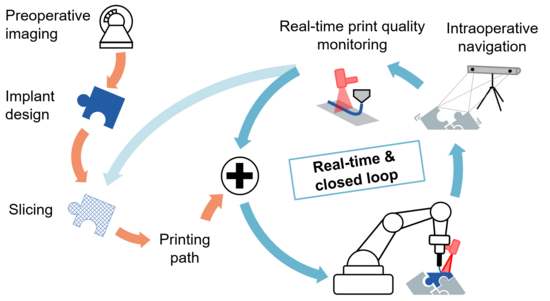
In the medical field, additive manufacturing technology can enable the personalization of implants by considering patient-specific anatomy and pathology. The conventional pipeline of in vitro (bio)printing and implantation presents some limitations, including increased risk of infection due to implant manipulation, greater damage to the surrounding tissues due to implant fixation, and a need for modifications in the implant to adapt to intraoperative deviations in surgical planning. To tackle these issues, in situ (bio)printing proposes the direct fabrication of the implant directly at the desired location in the body of the patient, using robotic systems that allow the deposition of material and the fabrication of complex structures with high precision.
Thus, the goal of this research project is to develop robotic systems that are capable of in situ bioprinting in a reliable, precise, and adaptive manner. To do so, both large-scale robotic arms as well as endoscopic and miniature robotic solutions will be explored to perform the printing process. Additionally, sensing and navigation systems will be integrated together with material-dependent dispensing mechanisms.
This project is a joint collaboration between the BIROMED-Lab group and the Swiss MAM group. Link to the project website from the Swiss MAM group here.
Project leader: Ruben Martin Rodriguez









M. Maintz, Y. Tomooka, M. Eugster, N. Gerig, N. Sharma, F. M. Thieringer, and G. Rauter, “In situ minimally invasive 3D printing for bone and cartilage regeneration - a scoping review,” Current Directions in Biomedical Engineering, vol. 10, pp. 66–70, Sept. 2024. Publisher: De Gruyter (Best Paper Award 2nd Prize)
Y. Tomooka, D. Spothelfer, A. Puiggali-Jou, C. Tourbier, E. B. Tankus, F. M. Thieringer, P. C. Cattin, G. Rauter, and M. Eugster, "Minimally invasive in situ bioprinting using tube-based material transfer", at - Automatisierungstechnik, vol. 71, no. 7, pp. 562-571, 2023.
P. Krenn, M. Eugster, E. I. Zoller, N. F. Friederich, and G. Rauter, “Towards robotic surgery for cartilage replacement: A review on cartilage defects,” in New Trends in Medical and Service Robotics (G. Rauter, G. Carbone, P. C. Cattin, A. Zam, D. Pisla, and R. Riener, eds.), (Cham), pp. 125–136, Springer International Publishing, 2022
Open
- Master Thesis: Optical-based flow scanning and calibration for in situ printing (PDF, 131.39 KB)
- Master Thesis: Patient motion compensation for in situ printing (PDF, 184.37 KB)
- Master Thesis: Development of an endoscopic 3DP system (PDF, 165.96 KB)
- Semester Project: A pneumatic dispensing toolhead for in vivo 3D printing (PDF, 141.06 KB)
- Semester Project: An automatic temperature control system for in vivo bioprinting (PDF, 143.93 KB)