Open Projects:
- Master Thesis: Design of a Controller for an Over-actuated Cable-Driven Parallel Robot (PDF, 719.28 KB)
- Master Thesis: Development of a High-Precision Motorized Syringe-Based Microinjector for Hydrogel Therapy (PDF, 333.28 KB)
- Master's Thesis: Development of an Automated Interchangeable Pipetting-Head for Collaborative Robots (PDF, 1.57 MB)
- Master Thesis: Miniature sensing solution for intraoral devices (PDF, 292.61 KB)
- Master Thesis: Development of an Automated Interchangeable Pipetting-Head for Collaborative Robots (PDF, 1.57 MB)
- Master Thesis: Development of a High-Precision Motorized Syringe-Based Microinjector for Hydrogel Therapy (PDF, 333.28 KB)
- Master's Thesis: Design of a Controller for an Over-actuated Cable-Driven Parallel Robot (PDF, 719.28 KB)
- Master Thesis: Trajectory planning for automated tooth milling using a miniature intraoral robot (PDF, 283.07 KB)
- Master Thesis: Control of a miniature intraoral robot and evaluation of its positioning accuracy (PDF, 518.95 KB)
- Master Thesis: Implementing a dental tool tracking system into a sensorized phantom head (PDF, 3.02 MB)
- Master Thesis: Controller to mimic motion and force of a human jaw with an active phantom (PDF, 927.49 KB)
- Master Thesis: Miniature absolute position sensor for a miniature robot (PDF, 379.33 KB)
- Internship: Development of a Laser-Assisted Robotic System for Cartilage Regeneration (PDF, 1.05 MB)
- Master Thesis: Optical-based flow scanning and calibration for in situ printing (PDF, 131.39 KB)
- Master Thesis: Contact force evaluation of robotic endoscopic system based on Series Elastic Actuation (PDF, 193.88 KB)
- Master Thesis: Vibro-tactile feedback in ventricle puncturing simulation during External Ventricula Drain (EVD) procedure (PDF, 3.14 MB)
- Master Thesis: Mechanical Design of a Robotic Arthroscope (PDF, 3.88 MB)
- Bachelor Thesis: User Interface Design for Surgeons (PDF, 3.88 MB)
- Master Thesis: Kinematic Modeling of a Robotic Arthroscope (PDF, 3.91 MB)
- Master Thesis: Sterile Locking Interface and Surgical Workflow Development for Surgical Robot (PDF, 1.11 MB)
- Master Thesis: Force Sensing with Series Elastic Actuation Component for Surgical Robot (PDF, 1.13 MB)
- Master Thesis: Development of an endoscopic 3DP system (PDF, 165.96 KB)
- Master Thesis: OCT-Based Adaptive Orientation Control (PDF, 4.10 MB)
- Master Thesis: Constraint-Compliant Control for Laser Ablation (PDF, 4.06 MB)
- Master Thesis: Markerless Preop-Registration with Stereovision (PDF, 4.04 MB)
- Internship: Mechatronic System Development (PDF, 4.04 MB)
- Master Thesis: Trinocular Endoscope Stereomatching (PDF, 4.06 MB)



Initiative applications are always welcome
Completed Projects:
- Master Thesis: Testing usability for different surgeon input mappings in VR to move a robot mounted neuroendoscope (PDF, 2.38 MB)
- Master Thesis: Development of a multipurpose user console for visuo-haptic interaction (PDF, 1.02 MB)
- Master Thesis: Series elastic actuation component for surgical robot (PDF, 1.82 MB)
- Internship: Path planning for a hyper redundant robot inside the human knee (PDF, 125.88 KB)
- Master Thesis: Development of a minimally invasive 3D printing robot (PDF, 1.37 MB)
- Master Thesis: Machine learning approach for automated assessment of organoid vasculature (PDF, 621.42 KB)
- Master Thesis: Design, implementation, and evaluation of a sterile workflow for robot-assisted laser ablation of cartilage tissue (PDF, 8.80 MB)
- Master Thesis: Intraoperative registration of a surgical tool with preoperative CT data based on optical tracking (PDF, 568.68 KB)
- Master Thesis: Sensor concept, design and implementation for an automated plate handling system inside a robotic incubator (PDF, 277.16 KB)
- Semester Project: Testing usability of surgeon input mappings with an externally tracked VR headset to display an endoscopic camera image (PDF, 2.39 MB)
- Bachelor Thesis: Development of a continuum robot for endoscopic in situ 3D bioprinting (PDF, 2.46 MB)
- Master Thesis: Miniature robot design analysis for accurate tool positioning in intraoral treatments (PDF, 76.12 KB)
- Semester Project: Miniature sensing unit for an accurate miniature tool positioning robot (PDF, 44.07 KB)
- Master Thesis: Automated dental drill analysis for miniature intraoral robot development (PDF, 74.40 KB)
- Master Thesis: Implementing a dental tool tracking system into a sensorized phantom head (PDF, 74.14 KB)
2022 and earlier:
- Master Thesis: Surgical robot for laser osteotomy (PDF, 3.00 MB)
- Bachelor Thesis: Design of Active Leg Fixation for a Self-Stabilizing Robotic Endoscope (PDF, 1.17 MB)
- Master Thesis: Actuation and Control of a Robotic Endoscope for Laser Osteotomy in the Knee (PDF, 2.60 MB)
- Master Thesis: Actuation design for a bone-mounted parallel mechanism (PDF, 942.54 KB)
- Master Thesis: Intuitive haptic telemanipulator for a robotic endoscope (PDF, 615.43 KB)
- Semester Thesis: Design of a flexible endoscope shaft for laser osteotomy in the knee (PDF, 2.60 MB)
- Master Thesis: End-effector stabilization of a robotic endoscope in laser osteotomy (PDF, 117.31 KB)
- Semester Thesis: Design of a decoupling mechanism for disturbance rejection in robotic laser osteotomy (PDF, 701.26 KB)
- Master Thesis: Visual servoing test bench for an articulated robotic endoscope (PDF, 217.71 KB)
- Semester Thesis: Design and simulation of series elastic joints for a prototype surgical robotic arm (PDF, 1.24 MB)
- Semester Thesis: Design of series elastic actuation for a cable-driven articulated endoscope (PDF, 544.06 KB)
- Master Thesis: Tool-changing laparoscope for reducing the surgery duration (PDF, 343.99 KB)
- Master Thesis: Learning desired null-space poses for inverse kinematics from the operator (PDF, 1.44 MB)
- Master Thesis: Development of a modular series elastic joint for a prototype robotic arm for surgeries (PDF, 1.24 MB)
- Master Thesis: Enhancement of telemanipulation: A survey on haptic feedback and motion scaling for a robotic endoscope
- Semester Thesis: 3-DoF haptic guidance for intuitive teleoperation of a robotic endoscope
- Master Thesis: Interactive approach path planning system for insertion of a robotic endoscope in the human knee (PDF, 276.99 KB)
- Master Thesis: Design and implementation of an encapsulated force sensing device for minimally invasive endoscopic palpation (PDF, 226.76 KB)
- Master Thesis: Assessment of different grasp type handles for a teleoperated 6-DoF peg-in-hole task with the lambda.6 device
- Internship: Structural analysis of a miniature parallel robot for precise milling in surgery
- Master Thesis: Intuitive surgeon robot interface to control macro-robots and exchange surgical tools
- Master Thesis: Vision-based registration and control of a robotic endoscope for laser ablation
- Master Thesis: Augmenting a custom haptic input device handle with force feedback for intuitive grasping
- Master Thesis: Design of a rotational endoscope joint with integrated joint position sensor (PDF, 1.21 MB)
- Master Thesis: Plug & p...erform surgery – design of a mechanical interface to safely detach a tendon-driven robotic endoscope (PDF, 132.15 KB)
- Bachelor Thesis: Real-time visual feature recognition and metrology for mechanical micro-Parts
- Master Thesis: Manipulating the micro-world - design and fabrication of a small-scale force-sensitive gripping device
- Master Thesis: Path planning for hyper-redundant surgical robots
- Semester Project: Conception, implementation, and evaluation of a virtual simulation environment for a teleoperation user console
- Master Thesis: Switching tools on the fly - design and fabrication of a small-scale tool changing system for a miniature robot arm
- Master Thesis: Optimization-based design of a robotic endoscope for intraventricular tumor surgery
- Internship: Path planning for planar hyper-redundant surgical robots (PDF, 183.12 KB)
- Master Thesis: Robot-assisted laser ablation of engineered cartilage tissue - implementation of custom ablation shapes and evaluation of chondrocyte viability
- Master Thesis: Development and evaluation of a virtual simulation environment for a visuo-haptic user console (PDF, 957.18 KB)
- Master Thesis: Development and evaluation of a visual feature recognition framework for a robotic assembly system
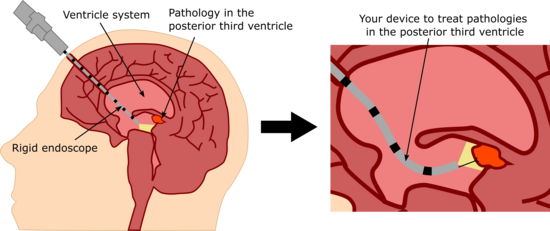
- Master Thesis: Development of an endoscopic device to treat pathologies in the posterior third ventricle (PDF, 536.16 KB)
- Master Thesis: Quantitative evaluation of shared surgeon-robot workspace for robot assisted knee surgeries (PDF, 2.94 MB)
- Master Thesis: Cell damage spreading in lesioned and laser ablated cartilage samples (PDF, 6.41 MB)
- Bachelor Thesis: Comparing cascaded controller architectures for reactive series elastic actuators (PDF, 2.39 MB)
- Master Thesis: Development and design of a multifunctional laparoscope (PDF, 404.06 KB)
- Master Thesis: Validation of estimated orientation from inertial measurement units with an optical tracking system (PDF, 240.70 KB)
- Master Thesis: Development of a minimally invasive 3D printing robot (PDF, 1.37 MB)