

The Department of Biomedical Engineering at the Faculty of Medicine of the University of Basel contributes to a better future in meeting health care needs by innovative biomedical research and engineering solutions and to translate basic science and engineering into medical knowledge and healthcare innovations.
The DBE lives translation in embedded research, benchside education, and advanced services. Join us as student, researcher, clinician, collaborator, or donor and help us to
- integrate engineering into medicine
- make high-tech treatment more available
- speed up diagnosis, treatment, and recovery
- solve all sorts of clinical problems
- go boldly where no one has gone before.
Join us! Whether you are ...
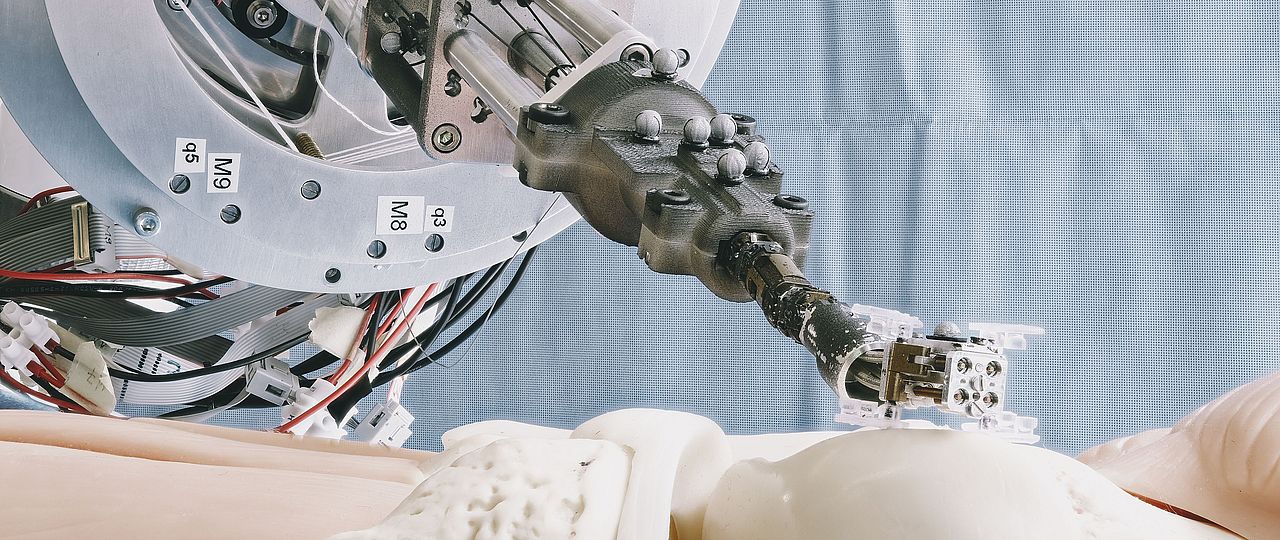
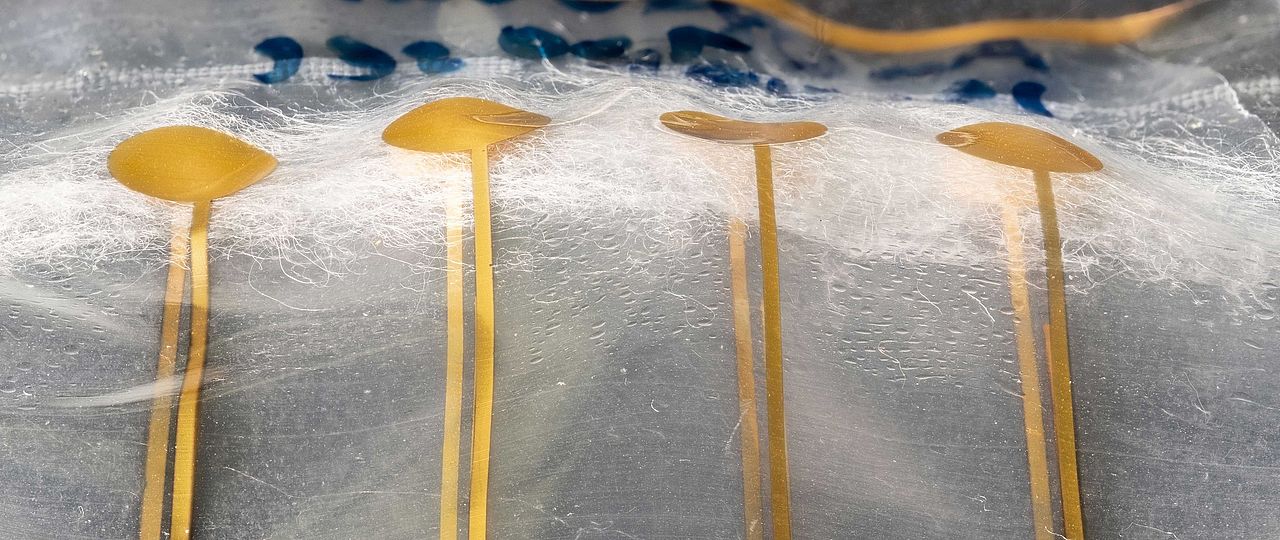
DBE: a space for discovery...
... where collaboration sparks innovation ...
... and brings science beyond the labs



How to find us

University of Basel
Department of Biomedical Engineering
Hegenheimermattweg 167B/C
4123 Allschwil
Switzerland