Fiber Shape Sensing
The flexible endoscope of the flagship project MIRACLE is expected to be continuously under the control of the robot. To give the surgeon direct feedback on the status of the flexible endoscope, its exact shape and position within the body of the patient needs to be sensed and visualized.
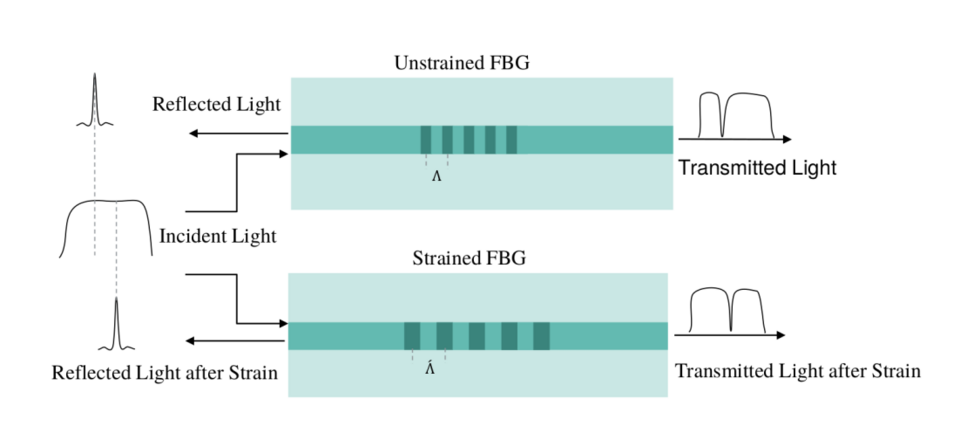
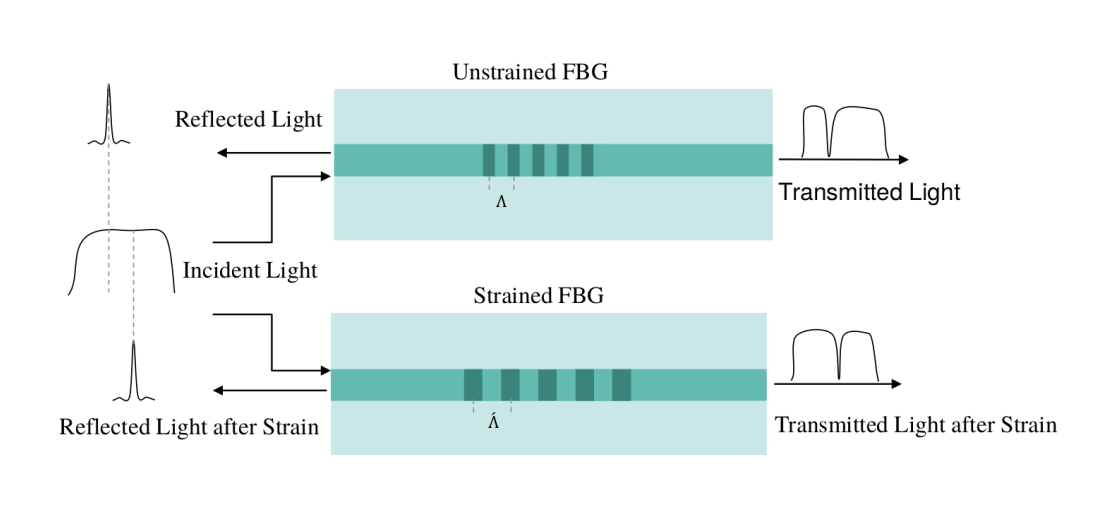
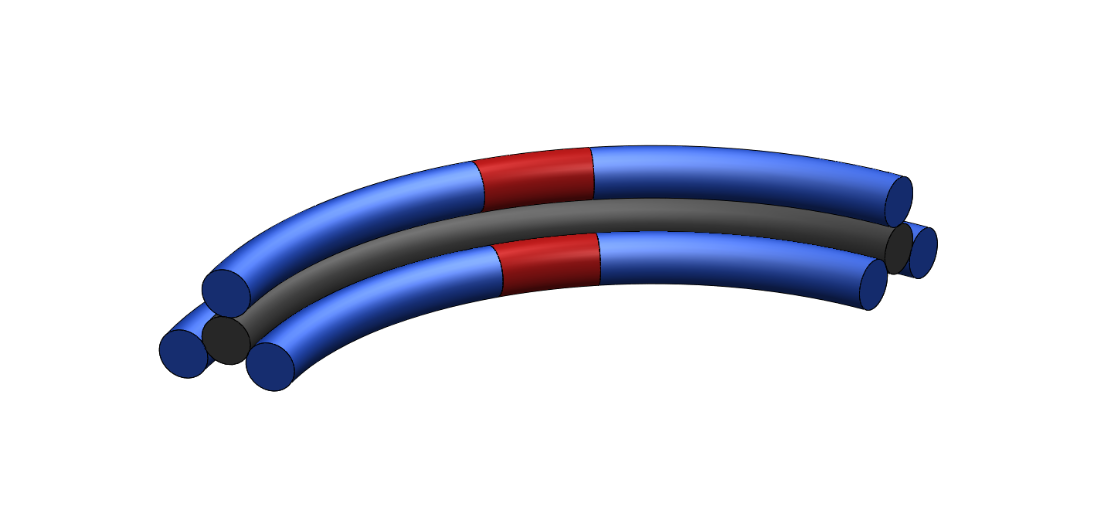
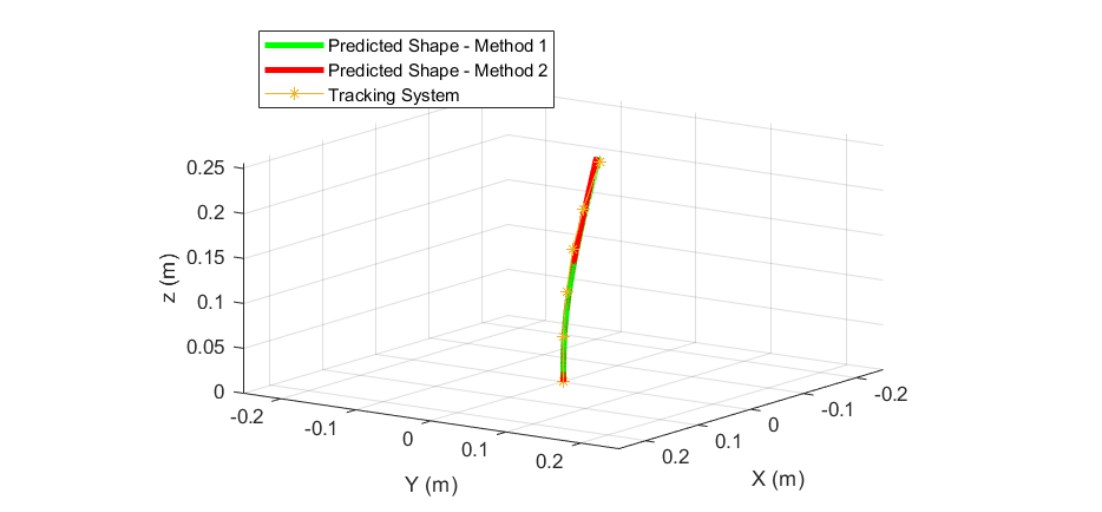
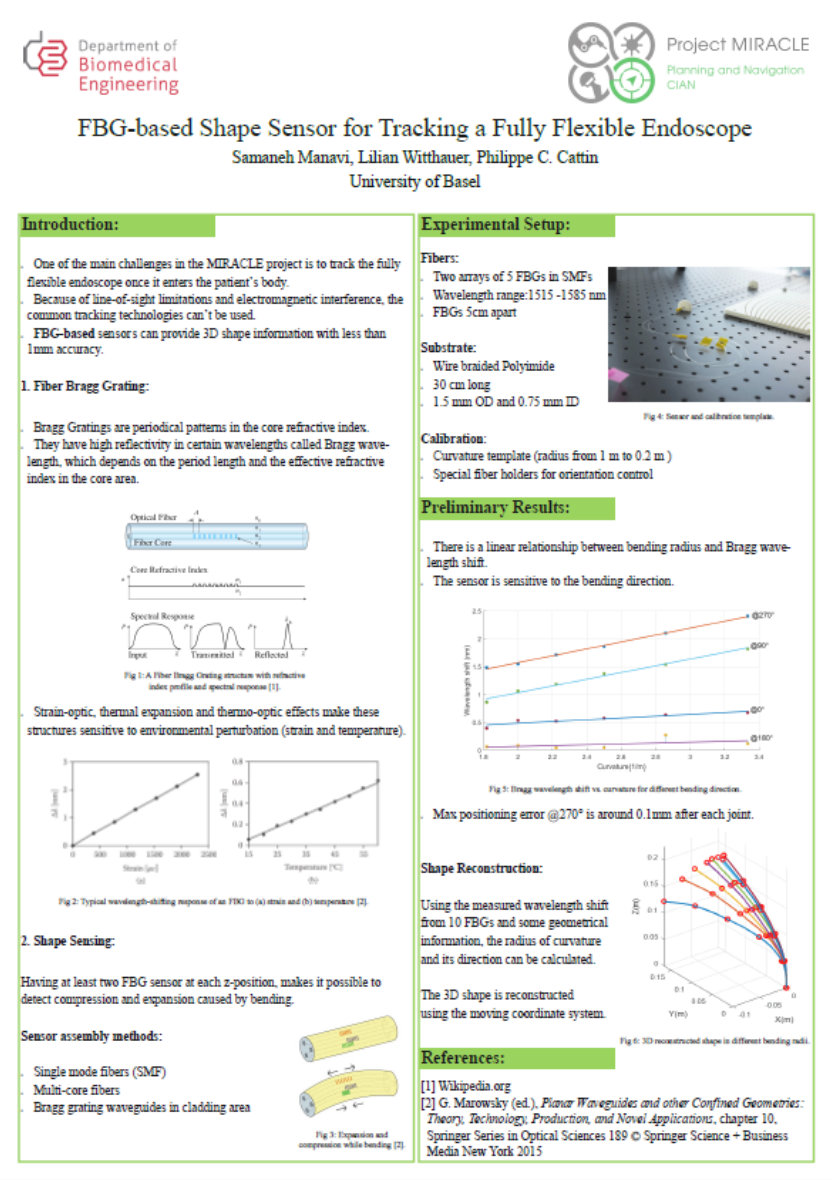
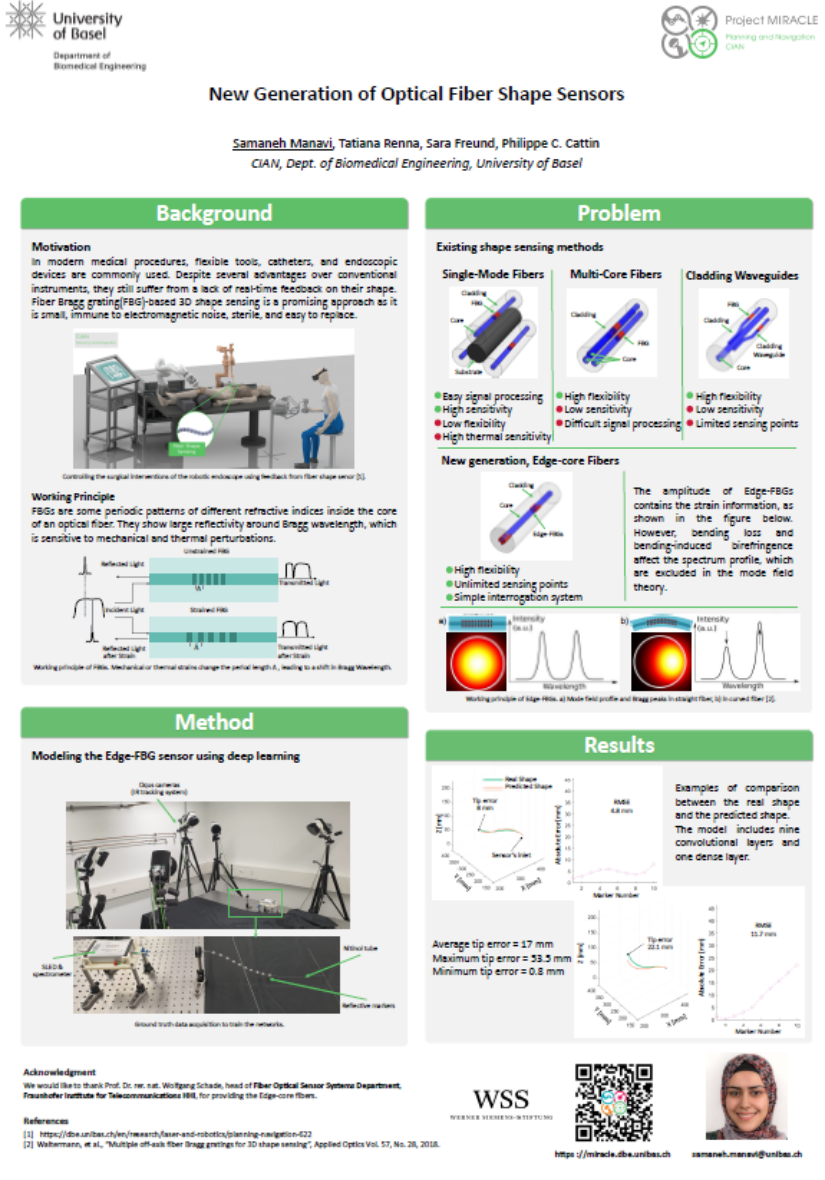
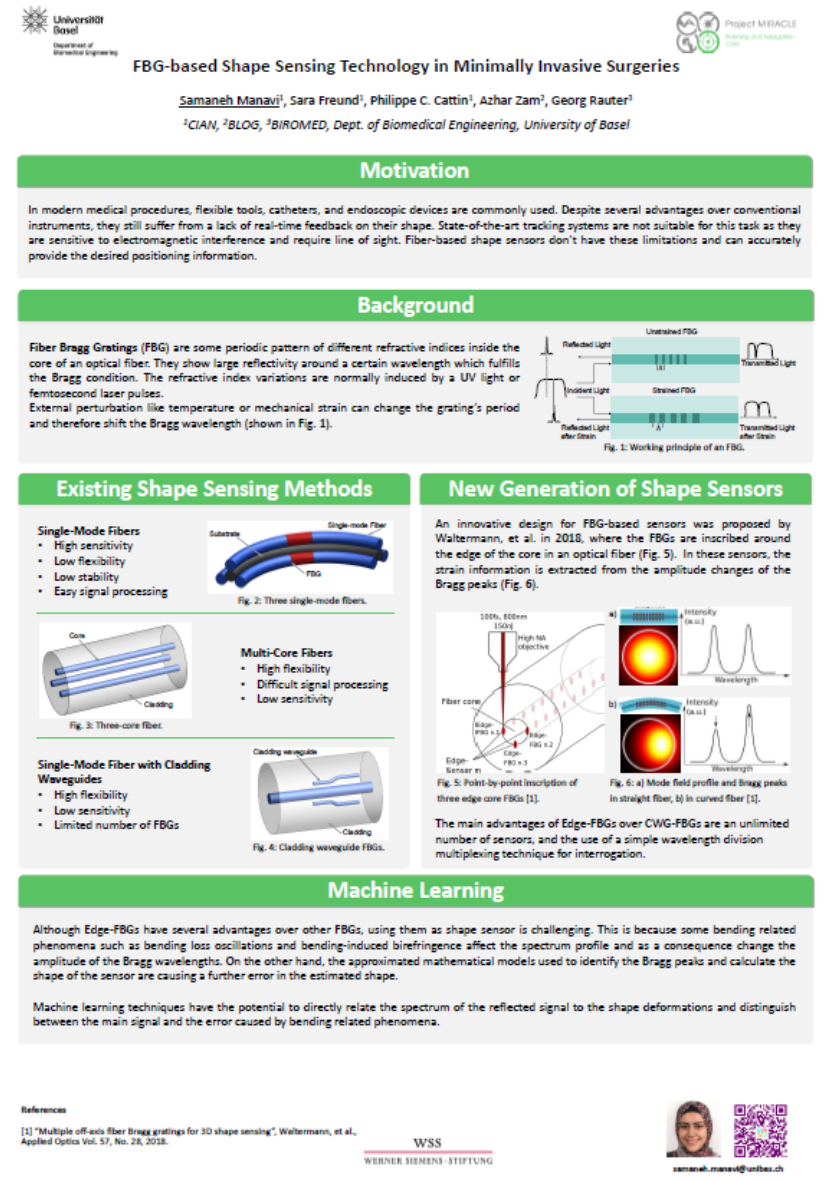
In surgical robotic systems, tracking information can be provided by encoders on the joints of the robot itself or through external measurement devices. Several technologies have been and are still used including mechanical linkages, various types of optical sensors, electromagnetic sensors, ultrasonic sensors, and global positioning based systems. However, none of the latter are perfectly suited to measure the shape and position of a flexible robotic endoscope with high enough accuracy in real-time. A promising approach, which has received recent attention due to its small size, bio-compatibility, and high sensitivity is a technique called Fiber Shape Sensing. Fiber Shape Sensing uses Fiber Bragg Gratings (FBG), which are short sections of a fiber where the core refractive index is modulated periodically. According to the Bragg criterion only a certain wavelength is reflected by the grating. Applying strain to the fiber changes the grating distance and therefore the reflected light spectrum. From the change in the spectrum, the strain and hence the shape of the fiber can be reconstructed.
Compared to other types of sensors, FBG-based sensors have several advantages as small size, immunity to electromagnetic fields, and easy handling. Furthermore, they can be used in sequence (multiplexing) in order measure the strain along the entire fiber.
This project will serve to bring the technology in house, investigate different types of FBGs and interrogation techniques, contribute to calibration procedures and reconstruction algorithms, and deal with the integration of fiber shape sensing into the endoscope.
Project leader: Samaneh Manavi
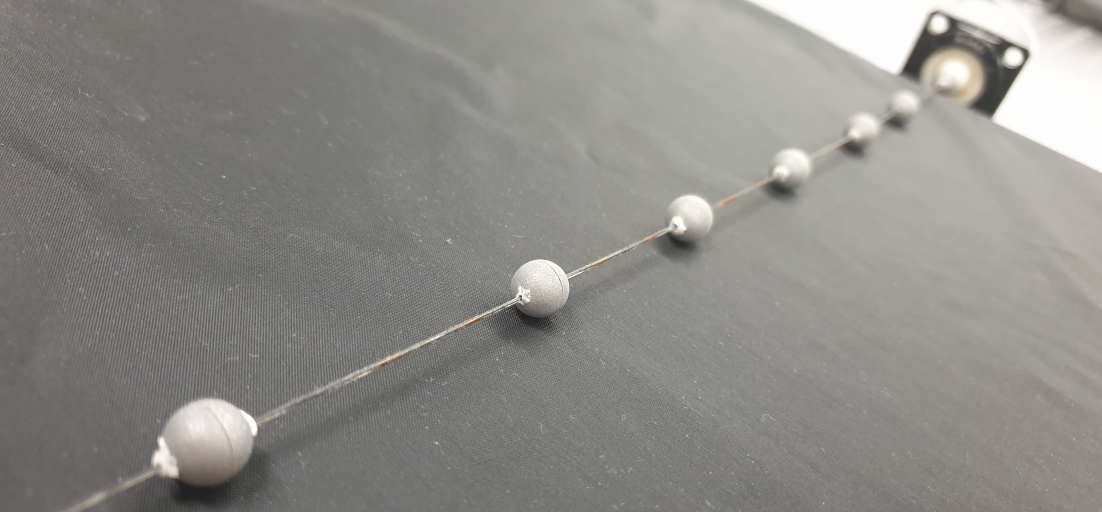



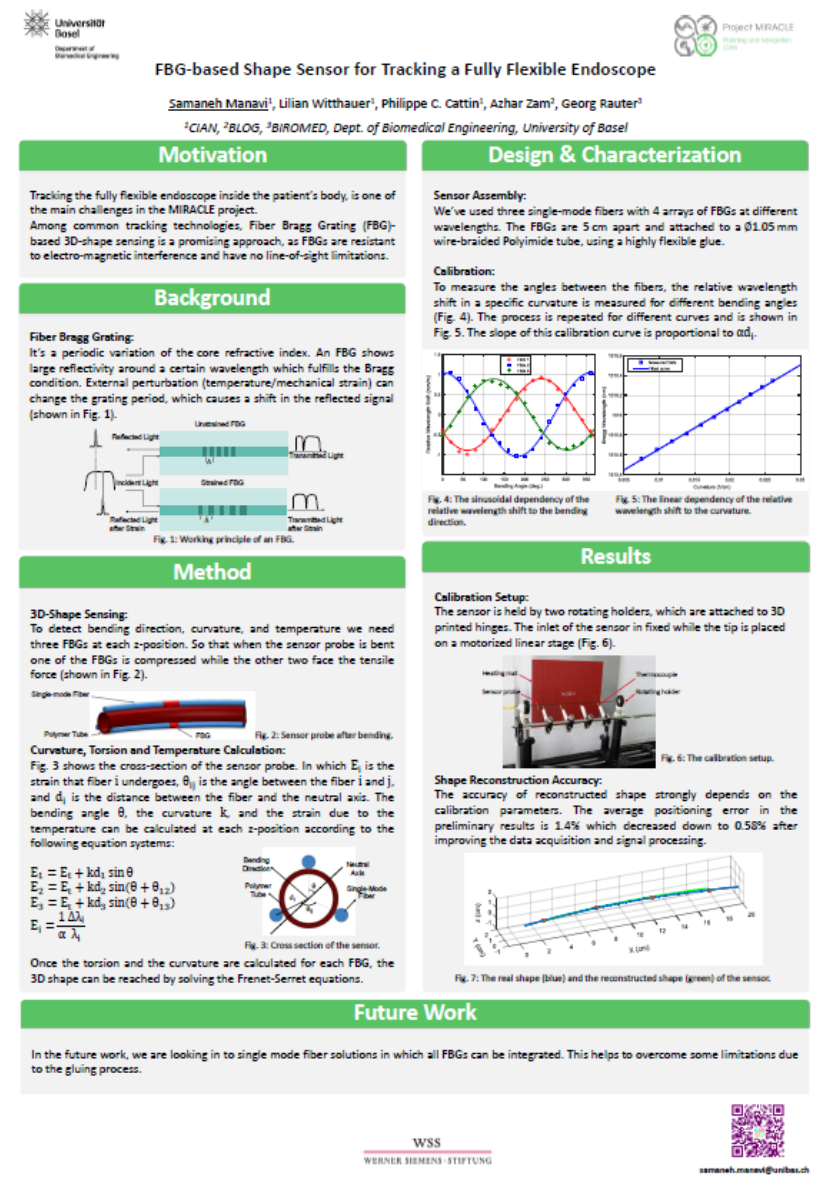
S. Manavi, S. Freund, A. Zam, G. Rauter and P. C. Cattin. Fabrication and characterization of a flexible FBG-based shape sensor using single-mode fibers. IEEE Transactions on Biomedical Engineering, vol. 69, no. 8, pp. 2488-2498. read
S. Manavi, T. Renna, A. Horvath, S. Freund, A. Zam, G. Rauter, W. Schade, and P. C. Cattin. Using supervised deep-learning to model edge-FBG shape sensors: a feasibility study. Proc. SPIE 11772, Optical Sensors 2021, 117720P. read
S. Manavi, L. Witthauer, L. Iafolla, A. Zam, G. Rauter, and P. C. Cattin. Temperature-compensated FBG-based 3D shape sensor using single-mode fibers. Advanced Photonics 2018, Zurich Switzerland, paper JTu6C.1. read